●High precision, strong resistance to bias load
● overload protection, Built-in communication board for RS-485, Ethernet, and EtherCAT communication.
●Easy to install, IP66
●Accept custom specifications
●Precision control of robotic arms, surface grinding and polishing, precision machining in machining centers, precision testing of medical devices.
| Force characteristics | Unit | A1 | A2 | C1 | C2 | C3 | D1 | D2 | D3 | D4 |
| Force Fxy | N | 150 | 300 | 750 | 1000 | 1500 | 2000 | 2500 | 3000 | 5000 |
| Force Fz | N | 350 | 700 | 1800 | 2400 | 3600 | 5000 | 6000 | 7350 | 10000 |
| Torque Mxy | N-m | 4 | 6 | 18 | 24 | 35 | 45 | 60 | 70 | 300 |
| Torque Mz | N-m | 10 | 18 | 48 | 64 | 95 | 125 | 160 | 190 | 500 |
| Parameters | Specifications | Technique |
| Rated range | Nomial load | Please refer to the table |
| Overall accuracy | Combined error | 0.5%F.S. |
| Insulation resistance | Insulation | ≥2000M9/50VDC |
| Excitation voltage | Recommended excitation | 5V |
| Maximum excitation voltage | Maxmum excitation | 15V |
| Temperature compensation range | Compensated temp range | -10~40℃ |
| Operating temperature range | Operation temp range | -20~60℃ |
| Ultimate overload | Ultimate overload | 200%F.S. |
| Cable length | Cable length | 4000mm (High-flex cable) |
| Material | Material | Stainless Steel |
| Protection level | Protection class | IP66 |
| Overload capacity | Aluminum alloy | 17-4 Stainless steel |
| Fxy | 200% | 200% |
| Fz | 200% | 200% |
| Mxy | 200% | 200% |
| Mz | 200% | 200% |
| Stiffness (calculation) | Aluminum alloy | 17-4 Stainless steel |
| X-axis and Y-axis forces (Kx, Ky) | 3.4x106 N/m | 3.4x106 N/m |
| Z-axis force (Kz) | 1.3x107 N/m | 1.3x107 N/m |
| X-axis and Y-axis torques (Kmx, Kmy) | 2.7x103 N/m | 2.7x103 N/m |
| Z-axis torque (Kmz) | 1.1x104 N/m | 1.1x104 N/m |
Note:
1. The overload capacity and stiffness can be customized according to requirements.
2. The output resolution is 0.1% and it supports two communication methods: EtherCAT and Ethernet. Data can be directly read and the sampling frequency is 1kHz.
Direction of force |
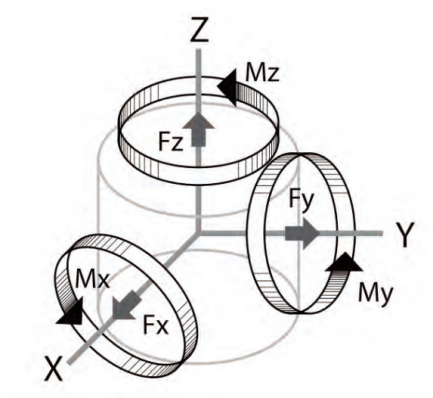 |
Note:
1. The fixed reference system of the sensor is located at the center of the lower surface of the sensor.
2. The relative reference system of the sensor has its origin at the center of the upper surface.

Room B612-59, No. 91 Hanjiang West Road, Xinqiao Street, Xinbei District, Changzhou City, Jiangsu Province, China